최근 주차 관제 및 무인 차단기 시스템에서 레이더 센서의 역할이 점점 중요해지고 있습니다. 특히 기존 24GHz 대역에서 60GHz 초고주파 대역으로의 세대교체가 빠르게 이루어지고 있는데요. 현장에서 이 두 기술이 과연 어떤 차이를 만들어낼까요?
알고리즘 개발 시 가장 까다로운 두 가지 실무 시나리오를 통해 완벽히 분석해 보았습니다.
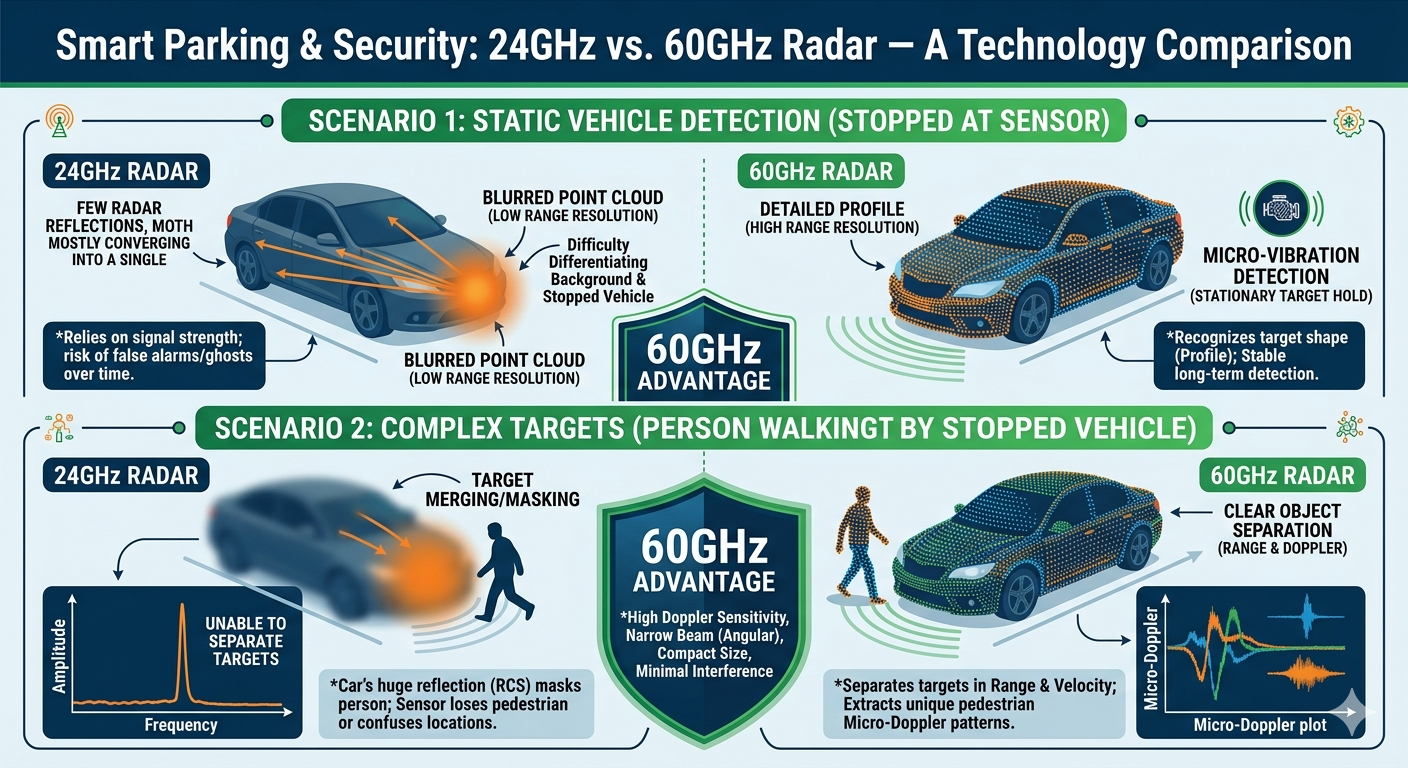
🛑 시나리오 1. 센서 앞 '완전 정차' 차량 유지 성능
차량이 정지하면 움직임을 감지하는 도플러 효과(속도=0)를 누릴 수 없습니다. 오직 반사되는 신호의 세기와 위치 정보만으로 거대한 타겟을 유지해야 하는 극한의 상황입니다.
- 24GHz의 한계 (고스트 타겟 발생): 거리 해상도가 약 60cm 수준으로 낮아 차량이 거대한 하나의 점(Point)으로 뭉개집니다. 주변 바닥이나 기둥의 고정된 반사파와 섞이게 되어 시간이 지나면 차량을 놓치거나(Miss), 차가 빠져나간 뒤에도 허상의 타겟(Ghost Target)을 만들어내는 오류가 잦습니다.
- 60GHz의 해결책 (형상 인식 유지): 수 cm 단위의 압도적인 거리 해상도를 자랑합니다. 차량 전면부의 번호판, 범퍼, 후드 등에서 반사되는 신호가 수많은 점(Point Cloud)으로 맺혀 차량의 '입체적인 공간 점유 형상' 자체를 인식합니다. 더불어 엔진의 미세한 진동까지 잡아내어 단순한 고정 구조물과 정차된 차를 완벽히 구분해 냅니다.
🚶♂️ 시나리오 2. 정차 차량 옆을 지나가는 '보행자' 분리 능력
반사 면적(RCS)이 압도적으로 큰 철제 차량 옆에 반사율이 낮은 사람(보행자)이 지나가는 상황입니다. 레이더 센서가 가장 쥐약으로 여기는 '마스킹 효과(Masking Effect)'가 발생합니다.
- 24GHz의 한계 (타겟 병합 및 소실): 해상도의 한계로 차량과 사람이 같은 거리 반경 내에 들어오면 하나의 덩어리로 묶여버립니다. 차량의 강력한 반사파가 사람의 미약한 신호를 완전히 덮어버려 보행자를 놓치거나, 정차된 차량의 위치 좌표가 사람의 움직임에 끌려 순간적으로 튀는 심각한 오류가 발생합니다.
- 60GHz의 해결책 (정밀 클러스터링): 10~20cm의 거리 차이만 있어도 두 객체를 서로 다른 구역으로 분리합니다. 특히 사람 특유의 팔다리 교차 움직임(마이크로 도플러 패턴)을 고감도로 캐치해 냅니다. 속도가 0인 거대 군집(차량)과 특정 속도로 이동하는 작은 군집(보행자)을 알고리즘적으로 완벽히 나누어 추적할 수 있습니다.
📊 한눈에 보는 핵심 성능 비교표
| 비교 항목 | 24GHz 레이더 | 60GHz 레이더 | 실무(주차/관제) 체감 효과 |
|---|---|---|---|
| 거리 해상도 | 낮음 (~60cm) | 매우 높음 (수 cm) | 타겟의 정밀한 윤곽 인식 및 밀집된 다중 객체 분리 |
| 정차 차량 감지 | 신호 세기 의존 (오탐/미스 잦음) | 형상 및 미세 진동 인식 | 게이트 앞 장시간 정차에도 안정적인 타겟 검출 유지 |
| 보행자/차량 분리 | 거대 타겟 신호에 보행자 묻힘 | 마이크로 도플러 패턴 분리 | 복합 타겟(차+사람) 환경에서도 독립적인 객체 추적 |
| 센서 크기(하드웨어) | 상대적으로 큼 | 매우 작음 (초소형화) | 좁은 차단기 내부 등 디자인 자유도 상승 및 소형화 용이 |
💡 결론: 왜 60GHz 레이더인가?
단순히 '무언가 다가오고 있다'를 판단하는 것을 넘어, '어떤 형태의 객체가, 어떻게 움직이고, 어디에 멈춰 있는지'를 정확히 분류해야 하는 현대의 LPR(차량번호인식) 카메라 연동 관제 시스템에서 60GHz 레이더 센서의 도입은 이제 필수적인 흐름입니다.
정밀한 타겟 분리와 끈질긴 고정 타겟 유지가 필요한 환경이라면, 60GHz의 고해상도 포인트 클라우드 데이터를 활용한 설계가 가장 확실하고 안정적인 해답이 될 것입니다.
'Radar' 카테고리의 다른 글
| CRSM-1000 레이더 센서 사용법 총정리 — 60GHz mmWave 차량 진입·방향 감지 (1) | 2026.07.10 |
|---|---|
| 컨트롤스 레이더 차량 검지기 하드웨어 톺아보기: 명함보다 작은 초소형 레이더 (0) | 2026.07.03 |
| 차단기 제어 용 차량 검출, 어떤 센서가 적합한가? (0) | 2026.06.15 |
| 60GHz 레이더 차량 감지 센서 개발: 실전 트래킹(Tracking) 데모 (0) | 2026.05.28 |